My Research Projects
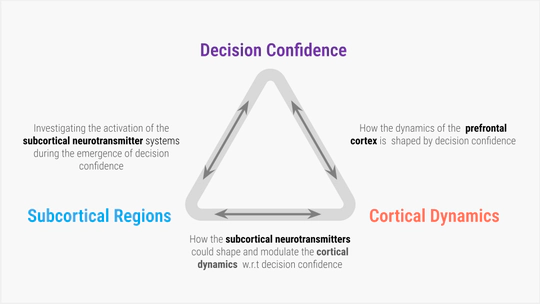
Dynamics of Neural Information Processing During the Emergence of Visual Metacognition
This study employs large-scale data-driven methods to analyze over 200 GB of fMRI data and 160 million time series neural signals to explore brain dynamics and identify patterns associated with neural disorders, enhancing future diagnostic and therapeutic potential for mental health conditions. An energy landscape model was developed to understand the brain representation of metacognition within the prefrontal cortex in the forms of energy levels and entropy measures. Using unsupervised machine learning, we identified two subcortical regions that influence the development of metacognitive abilities and the formation of the energy landscape metacognitive representation in the prefrontal cortex. Additionally, we introduced a brain information processing pathway involving subcortical-cortical interactions, employing information theory and mediation analysis to explain the emergence of metacognition. These findings contribute to a deeper understanding of the neural correlates of metacognitive processes.
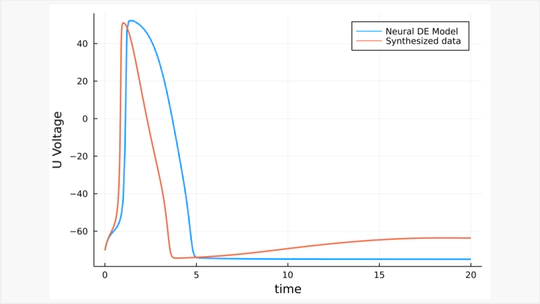
Neural Differential Equations for Hudgkin-Huxley Model
The Hodgkin-Huxley model is a fundamental framework for understanding neuronal dynamics, capturing the intricate gating mechanisms of ion channels in the cell membrane and elucidating the initiation and propagation of action potentials in neurons. Despite its significance, high-resolution neuronal modelling using the Hodgkin-Huxley equations is computationally intensive and complex, especially when adjusting for individual biological variations. This presents substantial challenges in large-scale simulations. In this context, neural differential equations emerge as a promising approach, leveraging advancements in machine learning to enhance differential solvers. This study explores the integration of neural networks with differential equations to model Hodgkin-Huxley dynamics. Specifically, we propose a novel methodology that employs neural networks to approximate ion channel gating variables and to solve the differential equations governing voltage changes across the cell membrane, offering a more efficient and adaptable solution for large-scale neuronal modelling.
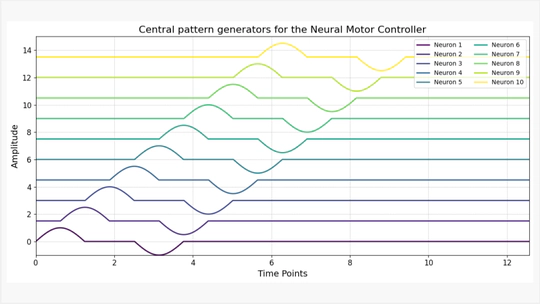
Using CPG for Motor Control
This project explores the application of Matsuoka et al.'s oscillatory network model for controlling bipod walking and snake-crawling robots in distinct and challenging scenarios. Central Pattern Generators (CPGs) are biological neural circuits that produce rhythmic outputs, which can be harnessed for locomotion control in bio-inspired robots. This work investigates how biological principles can inspire more robust and natural movement behaviours in robotic systems by implementing a CPG model on a microcontroller using Arduino. The CPG model was integrated with the robots to optimize their performance across the two tasks, providing valuable insights into translating biological locomotion strategies into robotic applications.
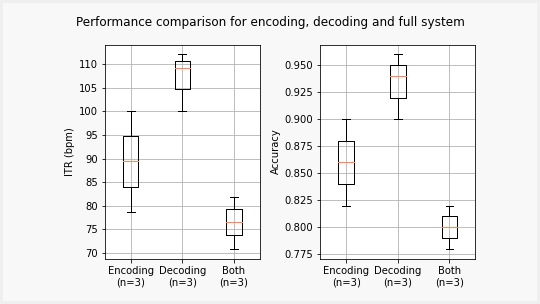
Threshold-based Information Transfer System with IMU, EMG and Vibrotactile motor
In this project, we developed a novel data-transmission system between two distinct locations using local WLAN networks, leveraging an Inertial Measurement Unit (IMU) for encoding transmitted information and four vibrotactile motors for decoding. We introduced a threshold-based encoding approach that utilizes the IMU and electromyography (EMG) to encode numerical values from 0 to 9, aiming to optimize the information transfer rate (ITR) while minimizing the need for extensive pre-training of participants. An EMG signal was incorporated as an error-correction mechanism to enhance encoding accuracy. Experimental trials demonstrated a maximum information transfer rate exceeding 100 bits per minute and achieved over 99% accuracy, with performance optimization focusing on one metric at a time.
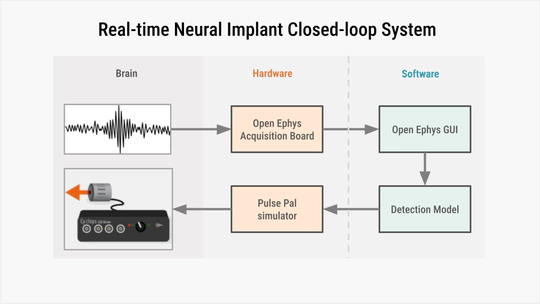
Real-time Sharp Wave Detection and Stimulation
Hippocampal sharp wave ripples (SWRs) are recognized as critical biomarkers for essential brain functions, including memory consolidation and episodic memory recall. Understanding the causal link between SWR mechanisms and behaviour necessitates the ability to perturb and modulate SWR events through precise electrical stimulation. This project focuses on developing a real-time neural implant SWR detection and stimulation system for closed-loop perturbation experiments, such as future optogenetics research. The system achieves a latency of less than 20 milliseconds, faster than the duration of SWR generation and dissipation, allowing for timely detection and disturbance of SWRs. With an accuracy rate of approximately 97%, this model is reliable for integration into closed-loop systems, providing a robust tool for investigating the role of SWRs in brain function.
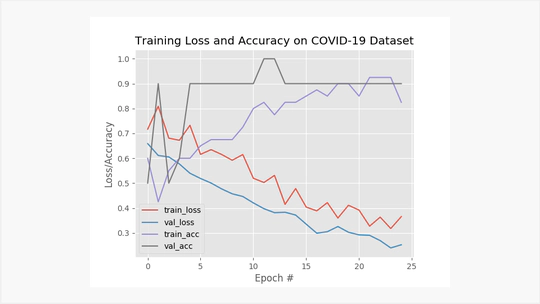
Detection of COVID-19 Patterns in Chest X-ray Scans Using Machine Learning
The urgent need for scalable, rapid, and accessible yet accurate diagnostic methods is paramount in combating pandemics. COVID-19 patients often exhibit subtle patterns in chest X-ray images that can be challenging to discern with the human eye. Consequently, machine learning offers a promising solution for automating pattern recognition faster and more precisely. This project developed a diagnostic model utilizing Convolutional Neural Networks (CNNs) with a ResNet architecture, leveraging transfer learning pre-trained on ImageNet. The model was trained on a pre-classified dataset of 3,429 X-ray images, comprising COVID-19, pneumonia, and healthy patients. Its performance was subsequently validated using 378 out-of-distribution X-ray images from different patients. The model achieved an overall accuracy of approximately 92% in correctly classifying the images into three categories: COVID-19, non-COVID-19 pneumonia, and healthy. This high accuracy demonstrates the model's potential as a reliable tool for rapid and automated diagnosis in pandemic response efforts.
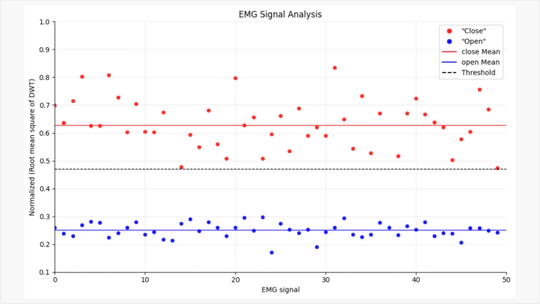
EMG-based Prosthetic Hand
In response to the urgent need to improve the quality of life for amputees following the devastating war in Benghazi, this project focused on designing and constructing an EMG-based prosthetic hand that integrates with the human body's nervous system. We aimed to contribute to societal healing by providing advanced bionic prosthetic solutions. The design involved acquiring EMG data from the arm surface using locally made electrodes and converting this data into mechanical motion to perform six distinct movements. This model processes the electrical signals by extracting features through statistical analysis and wavelet techniques, which are classified into six multi-classes using machine learning algorithms. The prosthetic hand is powered by servo motors controlled via an Arduino Uno, ensuring precise and responsive movements. This innovative approach promises to enhance the functionality and usability of bionic prosthetic hands, significantly improving amputees' daily lives.